

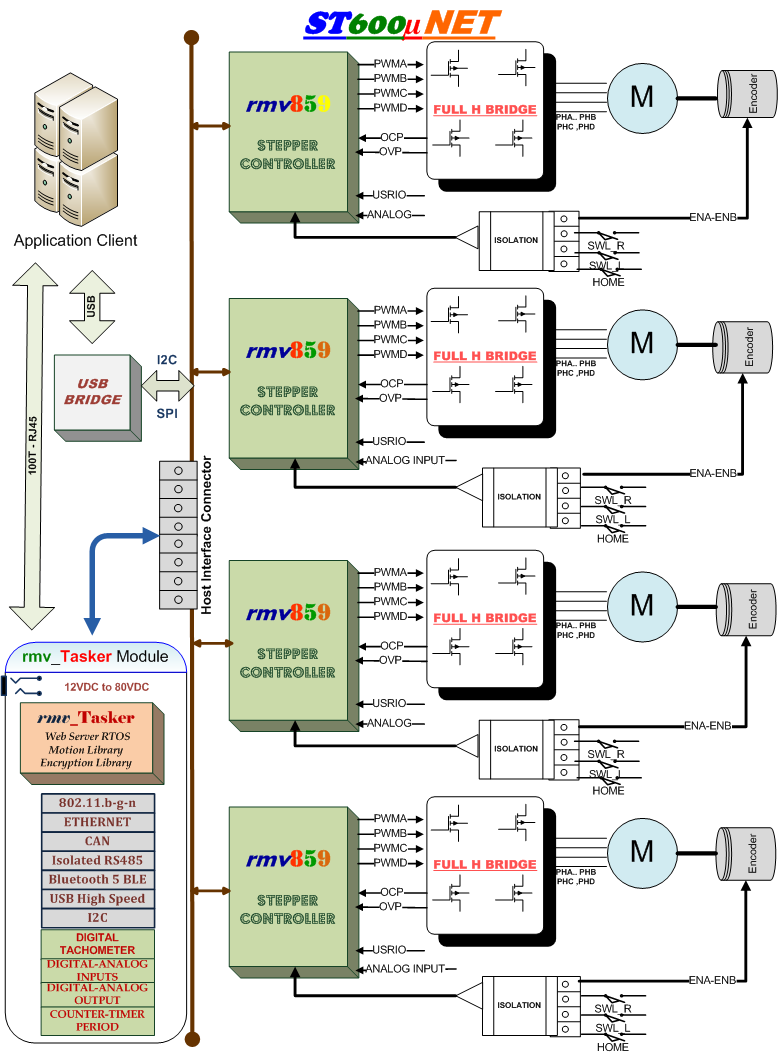
Each ST600µNet controls
"Four" stepper motors
independently with full chopper driver included, trough a set of
different triggers mode. Can be connected “directly” to a host computer via USB HDI to IIC link, “or in conjunction” with
rmv_Tasker Module
(RTOS with Full Embedded
Server), allowing in this way a full IoT capabilities via Ethernet 100T, WI-FI,
or Bluetooth 5.
The ST600µNet Series can operate in both monophasic and biphasic mode, with step mode size as follows: full step, half step, quarter step, 1/8 step, 1/16 step, 1/32 step, 1/64 step, 1/128 step, and 1/256 step. The ST600µNet Series motor current depending on the model can drive: A) From 0.5 Amp to 5.0 Amps, and B) From 1 Amp to 8.5 Amp per axis. Furthermore, this series provides the capability of having a step rate as fast as 25,000 steps/second.
Each Motor
Manufacturer Parameters can be saved to RMV859 Internal Flash.
In Addition, ST600µNet supports the following Motion Mode:
Trapezoidal, Speed Control, Profile Motion,
S-Curve, PI, Current Controlled, Sequential Trigger Motion,
Closed LOOP, and Voltage Constant.
As part our commitment to "Open Source" ST600µNet application software will be supported to: Raspberry PI, Beaglebone.
Free samples can be downloaded via GitHub. Please see
the link bellows.
| Step Modes | Full-Half step Monophasic & Biphasic, Micro Steps { ¼, 1/8, 1/16, 1/32, 1/64, 1/128, and 1/256 of step }. Mixed step resolution size can be achieved in real time via software commands. |
|---|---|
| Motor Chopper Driver | Independent motor current setting per axis from: A) 0.5 Amp to 5.0 Amp ,or B) 1 Amp to 8 Amp, depending of the model. Feedback winding current is measured during cycle by period. Chopper driver with over current protection, Over temperature protection, and Under Voltage Protection. Real Time Temperature Heat Sink read allowing the best motor performance vs. ambient temperature |
| Host Interface | USB HID Interface, full compatibility with: Linux Embedded, IOS, MS Windows,AWS, NO driver is needed. |
| rmv_Tasker Module | Connected via IDC Connector, SPI High Speed, Modbus (TCP-RS485), Web Server, HTML,IGMP,MQTT, JavaScript, 32MB File System. |
| Motion Mode | Speed control, Position Control, Trapezoidal, Velocity-contouring profile, Hardware Sequential Motion Setting, Electronics-Gear Profile, Parabolic, Spline, S-curve point to point profile. |
| Step Counter Register | −(231) to 231 − 1.Similar for Encoder Register when is enabled |
| Speed Register | Maximum slew rate ± 25,000 step/sec. |
| Motor Limits | Isolated Limit Switches Left, Right, Home, and
Stop. Voltage supported from 5V to 24V. |
| FIFO Memory | Programmable Internal FIFO RAM 700 words for different steps mode. |
| Analog Channels | 2 analog input channels |
| Closed Loop | Optical Encoder A, B, and
Index (5V to 24 V input signal) capability for each axis.
Ramp Controller, Speed calculation feedback. |
| Motor Parameters | In each axis, motor parameters can be programmed, like : motor inductance, winding current, winding resistance, step per revolution, and motor power. This parameters will optimize motion performance for the application. |
| Different Triggers Mode | Hardware Triggers: Two Isolated External (5V to 24V ),
rmv_Tasker Control Software Trigger: Command rigger and Sequential Trigger internally |
| Emergency Stop | Isolated push button input for emergency stop. Range: (5V to 24V ) |
| Status Event Register | Motion Complete , Position wraparound, Trigger, Command Error, Limit Switch Reached, Home, FIFO Status, etc. |
| Activity Status Register | At maximum velocity , Position Tracking, Current Profile mode, Axis settled, Motor Mode, Position Capture, Step Mode, In-motion, S-curve segment, FIFO bytes free ,Program Counter, Command Counter, etc. |
| Internal Report Status | Encoder Counter Register, At HOME, At A Limit Switch, STOP, User digital IO's, Analog inputs, Chopper status, Steps Counter Register, FIFO Pointer, etc.. |
| Power Requirements | Single Power supply range:16VDC-50VDC, regulated |
|---|---|
| Analog Channels | Two analog inputs: 4mA-20mA and (0V-5V) |
| Isolated Digital Inputs | Four input channels 5V to 24V |
| Isolated Digital Output | Six output channels 5V to 24V |
| Isolated Motor Signal | Limit Switches: LSW_LEFT, LSW_RIGHT,
HOME, STOP, EXTL_TRIGGER. Voltage Range: 5V-24V |
| Isolated Encoder Input | Isolated Encoder inputs A, B and Index , Voltage Range: 5V-24V |
| Host Interface | USB 2.00 high speed HID, mini USB connector |
| Heat sink Real Time Temperature | Ready Temperature measurement for motor power calculations, Maximum =150 ºC |
| Digital Voltage Output | Voltage Output:5VDC, Maximum Current: 0.5 Amp |
| Two LED Indicators | "Orange": USB Connection ESTABLISHED, "GREEN": Healthy POWER ON |
| Board Dimensions | Dimensions: 8"x5", RoHs Comply |
| Operating Temperature | Industrial Grade: -30ºC to +85ºC. High Temperature support Conform to UL-CSA, CE, FCC Standards. |
ST600µNet-5.0 (Motor Current
5 Amp continuous)
![]()
ST600µNet-8.0 (Motor Current 8.0 Amp continuous)
![]()
The latest application source code, user guide, ST600uNET.dll and
different library and O.S. support information, can be found at GitHub repository,
Please click the following link:
![]()